6자유도 모션

6자유도 모션
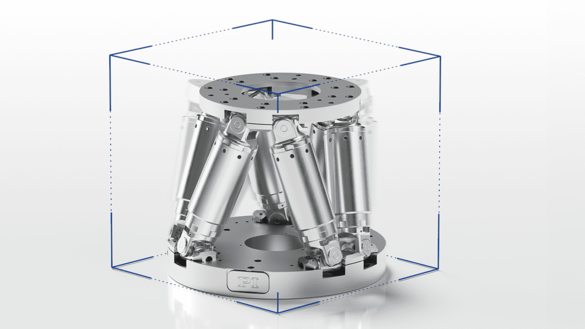
정밀 헥사포드는 단 하나의 기계 구조물에서 6자유도 초정밀 위치 결정 모션을 지원합니다. 플랫폼은 X, Y, Z 세 가지 방향의 병진 운동 축과 ΘX, ΘY, ΘZ 세 가지 방향의 회전 운동 축으로 움직입니다. 일반적인 병렬 키네마틱(parallel-kinematic) 구조의 헥사포드는 길이 변형이 가능한 6개의 액추에이터로 구성되는데, 각 액추에이터는 조인트를 통해 베이스 플레이트와 이동식 플랫폼에 연결됩니다.
협소한 공간에 설치 가능
협소한 공간에 설치 가능
병렬 키네마틱(parallel-kinematic) 설계가 적용된 정밀한 다축 제어 시스템인 헥사포드는 설치 공간이 매우 협소한 곳에서도 다축 이동을 수행할 수 있습니다. 그 덕분에 맞춤화된 공정, 기계, 시스템에 최적화된 상태로 통합할 수 있습니다.
자유롭게 정의 가능한 회전 중심

자유롭게 정의 가능한 회전 중심
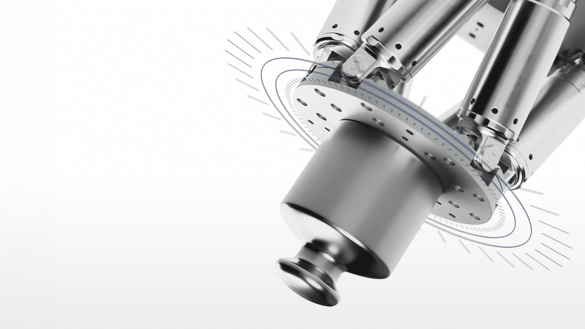
PI(Physik Instrumente)의 정밀 헥사포드에서는 정밀 모션 제어 소프트웨어 명령어를 사용해 회전 중심 위치(피벗 포인트)와 기준 좌표계의 방향을 쉽고 빠르게 정의할 수 있습니다. 좌표계 내에서 회전 중심을 자유롭게 선택할 수 있어 헥사포드 모션 플랫폼을 특정 요구사항에 맞게 정밀 조정할 수 있는 유연성이 극대화됩니다. 사전 정의된 작업 및 도구 좌표 시스템은 언제든지 활성화하거나 비활성화할 수 있으며, 기계 부품을 변경할 필요가 없습니다.
고강성도
고강성도
병렬 키네마틱(parallel-kinematic) 설계가 적용된 헥사포드는 강성도가 높다는 점이 특징입니다. 이에 따라 헥사포드 성능이 외력의 영향을 받지 않으며, 변동이 심한 힘의 영향을 받는 경우에도 필요한 위치를 유지할 수 있습니다.
최고 수준의 정밀도
최고 수준의 정밀도
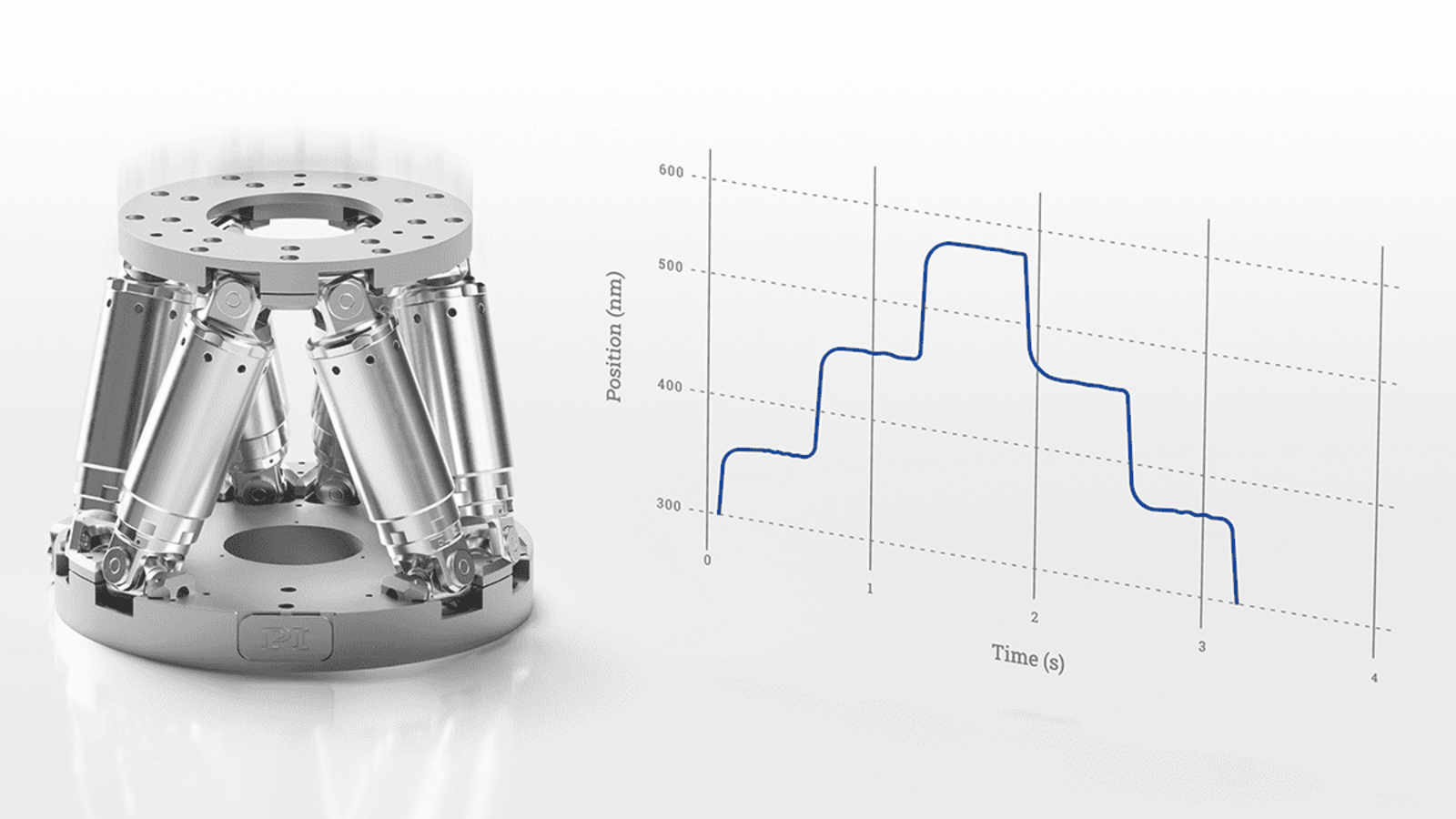
탁월한 설계를 토대로 고품질의 재료와 부품이 사용된 PI 헥사포드는 최고의 정밀도를 선사하기 때문에 정밀 로봇 제어에서의 나노 위치 제어 솔루션을 위한 완벽한 선택입니다. 표준 버전은 최대 20nm의 최소 이동 거리(MIM)와 ±0.06µm의 반복도를 달성합니다.
뛰어난 추적 정확도와 역동성
뛰어난 추적 정확도와 역동성
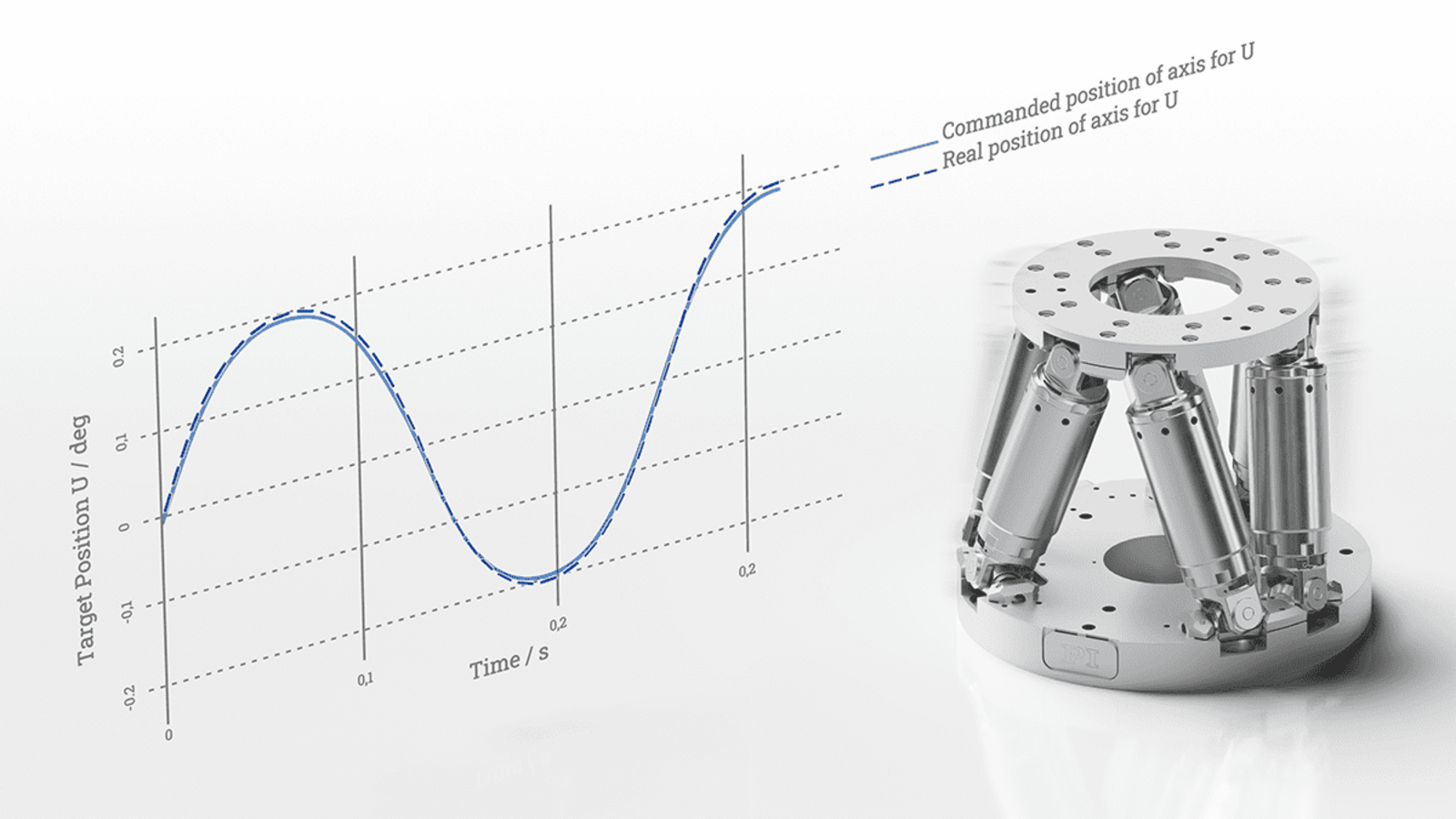
시스템 역동성이 높고 컨트롤러가 정교해서 목표 위치와 실제 위치를 최적의 상태로 정렬할 수 있습니다. 사인파 진동 궤적은 요구에 따라 컨트롤러를 통해 획득할 수 있으며, 최고의 추적 정확도로 모션 시퀀스를 허용합니다. 또한 액추에이터는 플랫폼만 이동시키기 때문에 질량이 적게 나가므로 비교적 적은 에너지를 소비하면서 동적 움직임과 진동을 구현할 수 있습니다.
손쉬운 통합
강력한 헥사포드 컨트롤러로 병렬 키네마틱(parallel-kinematic) 시스템을 간단하고 직관적으로 제어할 수 있어, 정밀 자동화 기계로의 통합에 적합합니다. 모든 목표 위치에 데카르트 좌표로 명령을 내릴 수 있습니다. 컨트롤러는 액츄에이터를 제어하고, 그에 따라 플랫폼을 원하는 방향으로 움직일 수 있도록 계산합니다. PI의 유니버설 그래픽 사용자 인터페이스(GUI)를 사용하면 전체 헥사포드 시스템뿐만 아니라 구동 기술이 내장된 다른 모든 PI 위치 제어 시스템을 제어하고 시작할 수 있습니다. 산업용 EtherCAT 인터페이스는 자동화 공정을 통합하는 데 사용할 수 있습니다.
다양한 PI 정밀 헥사포드 살펴보기
PI의 정밀 헥사포드는 30년이 넘는 PI의 개발 및 제조 경험을 바탕으로 탄생했습니다. 압전기식부터 전자기식까지 다채로운 구동 기술 포트폴리오를 자랑하는 PI는 광범위한 사양 요구사항과 설치 상황에 맞게 탁월한 센서 기술과 소프트웨어, 모션 컨트롤러가 결합된 헥사포드를 제공합니다. 강력하고 직관적인 컨트롤러와 소프트웨어를 활용하여 헥사포드를 쉽고 정밀하게 제어할 수 있습니다.
표준 버전에서 1kg~250kg의 부하와 ±0.06µm까지의 반복도를 지원하는 다양한 PI 정밀 헥사포드를 만나보세요. 2,000kg이 넘는 하중을 지원하는 맞춤형 정밀 헥사포드도 구입하실 수 있습니다.
